Robotpincér hajtómű
2 db bipoláris léptetőmotor lett, ami a mechanikai energiát szolgáltatja a robot mozgásához. A motorok egy-egy csiga-csigakerék hajtóművet (továbbiakban: hajtómű) használnak a fordulatszám redukálásra, a forgatónyomaték növelésére. A hajtómű áttétele 1:5 ami könnyen visszahajtható hajtást tesz lehetővé. A munkaterület teljesen vízszintes kialakítású, ezért a robot kikapcsolt feszültségmentes állapotában nem tud elgurulni, mert a tekercsei rövidre zárt állapotba kerülnek (elektromágneses féket kialakítva), megfelelő erővel el lehet tolni bekapcsolás nélkül. robotpincér hajtómű
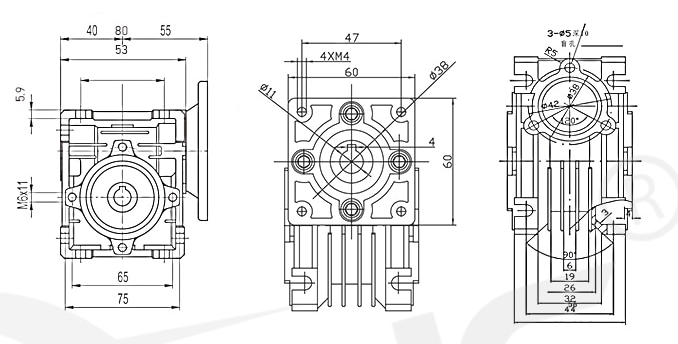
RV030 hajtómű rajz, méretek

RV030 hajtómű csatlakozások

RV030 hajtómű méretek

léptetőmotor csiga hajtóművel szerelve
A hajtómű kimeneti tengelyére egyénileg kell készíteni a kerék felfogására alkalmas adaptert amit a hatómű tengelyhez kell rögzíteni. A motor nagyobb fordulatszámnál képes is leadni a mozgáshoz szükséges teljesítményt, de a kisebb kerekek miatt nem tudja a robot túl lépni a kb. 1,5 km/óra végsebességet.
A max. 1,5 km/óra végsebesség biztonsági okok miatt van használva, mert nem csak elindulni és haladni kell, hanem szükség esetén gyorsan megállni a robot elé kerülő váratlan akadály miatt. A robot olyan munkaterületen dolgozik, ahol mozgásukban, látásukban, hallásukban, stb. korlátozott emberek közlekednek nem elkülönített útvonalon valamint a robotot irányító személy sem rendelkezik gyors reflexekkel.
A bipoláris motorok meghajtásáról cél áramkörök gondoskodnak készen kapható modul formában. DM556 jelű bipoláris léptetőmotor vezérlő max. 200 KHz jellel hajtható meg, a fél lépes állásban 400 impulzus/fordulat tökéletesen megfelelő szinkron hajtást tesz lehetővé a 2 db motor szögsebessége között, ezért a robot teljesen egyenesen képes elmozdulni. A percenkénti 300 fordulat eléréséhez 300*400=120.000 impulzusra van szükség, amit a DM556 meghajtó bőven képes teljesíteni.

DM556 beállításának adat táblája
A mikrovezérlő és a bipoláris léptetőmotor meghajtó között nagyon egyszerű illesztő áramkört kell beilleszteni néhány open kollektoros tranzisztorral és ellenállással megvalósítva. A megható fokozat bemeneti oldalán optocsatolók vannak.

DM556 vezérlő elektromos bekötése
A tápfeszültség +12V-ból történő átalakításához 2 db +24V-30V közötti értékre magas hatásfokkal (min. 95%) működő kapcsolóüzemű DC/DC konverter kerül alkalmazásra.

12V to 24-30V DC-DC konverter
A robot teste tartalmaz egy-egy ultrahangos távolságmérő egységet ami a robot kezelőjének az utasításait automatikusan felülbírálja – nullára csökkentve a robot sebességét -, ha a robot környezetében akadályt észlel, ezzel kerülve el az ütközést a haladási irányban. (A fordulás egy helyben történik, ide nincs külön ultrahangos ütközésgátló beépítve.)
Üzenet küldés: ITT