Robotpincér konstrukció
Igazi robotolás a felszolgálók egész napos, fárasztó szaladgálását váltják ki az olyan robotok amelyek a vendéglátó egységben a konyha és a vendégek között oda-vissza mozognak, hozzák-viszik a felszolgálásra szánt ételt-italt.
Az oldalon ismertetésre kerülő robot annyival másabb, hogy ezt távolból mobiltelefonon keresztül lehet irányítani. A robotra szerelt videokamera közvetíti a környezetben zajló eseményeket egy mozgássérült kezelő felé. Magyarországon ez lesz várhatóan az első olyan pincérrobot aminek a kezelését akár ágyban fekve meg lehet valósítani. Az ötletet egy japánba fejlesztett olyan pincérrobot adta amit mozgássérült fekve ágyból irányít.
A robot kialakításánál a biztonságos működés mellett az egyszerű felépítés (olcsó megvalósíthatóság) volt a fő szempont, ezért nem lett dizájnos kialakítás, csak egy guruló doboz ami a tetejére szerelt tálcát mozgatja a konyha és vendég asztala között. robotpincér konstrukció
A robot testének a X-Y irányú minimális méretét a két hajtómű és a közé rakott munka akkumulátor mérete szabja meg. Az akkumulátor hosszúsága 330 mm, a magassága 240 mm, a szélessége 173 mm plusz a szereléshez szükséges további legalább 20 mm-el nagyobb hely biztosítása körben, a különféle funkciót ellátó elektromos kábelek biztonságos elvezetése céljából. A robot testének a Z irányú (magasság) méretét a hajtóművek valamint akkumulátor és a felborulását akadályozó mechanikai egység határozza meg. robotpincér konstrukció

A pincérrobot teste egy guruló doboz
A guruló doboz alapterülete 480 x 480 mm, a határoló fala 20 mm vastag. A képen tető nélkül látható a két oldalon található hajtómű (kb. 4 kg/db) a középre helyezett munka akkumulátor (kb. 22 kg) amelyek miatt a súlypont alacsonyra került. A szimmetrikus elrendezés miatt a súlypont doboz közepén helyezkedik el.
A két oldalon egy – egy 125 mm átmérővel rendelkező 38 mm széles elasztikus (kopásálló) gumi hajtó kerék kapott helyet. Az ábráról nem látszik a takarás miatt, a guruló doboz négy sarkában önbeálló alacsony magasságú un. bolygó kerekek vannak. A bolygó kerekek mindig abba az irányba fordulnak ahonnan erő éri őket, csak támasztó szerepük van.

léptetőmotor hűtőbordával
A robot alsó szerelő lemeze és a padló között csak kb. 20 mm távolság van, mert a munkaterület teljesen sík. Azzal, hogy ennyire sikerült a padlóhoz közel tenni a robot testét, a felborulás veszélye nagy mértékben csökkent.
A kerék külső átmérője kb. 125 mm lesz, a hajtóműben szerelt motor fordulatszáma 0 – 300 1/min között változtatható. A kerék kerülete 0,392 m, a hajtómű redukciója 1:5, ezért a maximális sebesség 60 fordulat/perc * 0,392 m = 23,52 m/perc ami 1,4 km/h sebességet jelent. A csökkentett sebesség, elasztikus gumi kerék használattal rövid fékutat eredményez. Léptetőmotor tekercseinek rövidre zárása mellett elektromágneses fék alakítható ki nagyon könnyen és nagyon olcsón. Az elektromágneses fék rögzítésre is alkalmas nem csak a dinamikus mozgás gyors lecsökkentésére.

125 mm elasztikus gumi kerék
A hajtómű motorja 2 db bipoláris léptetőmotor szakaszos üzemmódra méretezve, hűtőbordával, hőérzékelővel, ventilátoros kényszerhűtéssel ellátva. A hajtómű csiga-csigakerék, áttétele 1:5 lassító, nyomaték növelő. A léptetőmotor előnye a nagy indítónyomaték, majd a felgyorsulást követően csökken a nyomatéka, de ha már egyenesvonalú egyenletes mozgást kell végezni a kisebb nyomaték is elegendő. A másik nagy előnye, hogy a két motor között egyszerű elektronikával lehet a fordulatszámot szinkronban tartani. Az irányító egységen csak négy gomb lesz, a kezelő nem tudná az eltérő szögsebességet korrigálni DC motorok esetén.

A pincérrobot guruló dobot teteje
A robot guruló dobot teteje 480 x 480 mm, 20 mm vastag és a a tető négy sarkára lettek elhelyezve azok a jelzőfények, amelyeknek menet közben villogni kell. A robot tetején kerül elhelyezésre a KI/BE kapcsoló valamint a STOP gomb is. A felső szerelhetőség érdekében a guruló dobozba fentről vannak becsavarva a tetőt rögzítő csavarok a robot testébe. A robot tálca tartója is felülről szerelhető a tálcarögzítő szerelvényekkel.
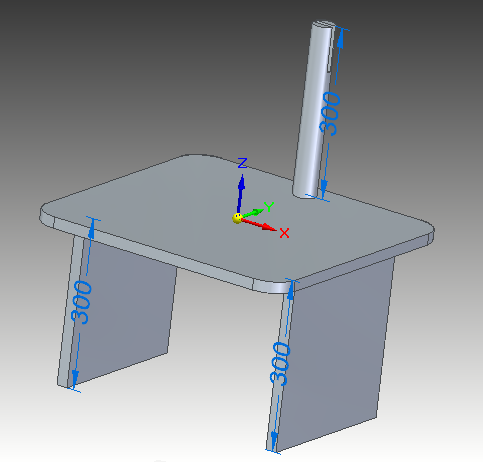
A robotpincér tálca és kamera tartó állvány
A tálca mérete 480 x 480 mm aminek a sarkai biztonsági okok miatt le vannak kerekítve R~50 méretben, a tálca lap vastagsága 20 mm ami a guruló doboz tetejére van rögzítve úgy, hogy a mechanikai összeszerelés felülről/oldalról könnyen megvalósítható legyen. A hengeres kamera tartó állványra lehet tenni megfelelő méretű adapter segítségével az okos telefont amiben az elő és hátlapi kamerák képeit lehet felhasználni a környezet érzékelésére és az interneten keresztül közvetített videóval lehet irányítani a robotot.
A robot távirányítása a hajtó kerék párral négy különböző irányba lehet menni. Előre, hátra, ami a hajtó kerékpárral párhuzamos irányt jelent, valamint jobbra vagy balra lehet fordulni úgy, hogy az egyik kerék előre, a másik kerék hátra forog, így a szerkezet képes a lehető legkisebb helyen megfordulni. robotpincér konstrukció
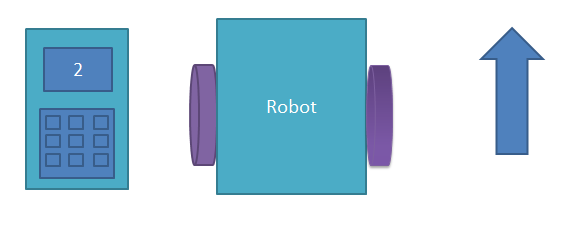
Robot irányítása „előre” mozgáshoz
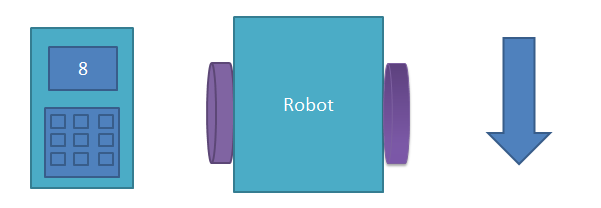
Robot irányítása „hátra” mozgáshoz
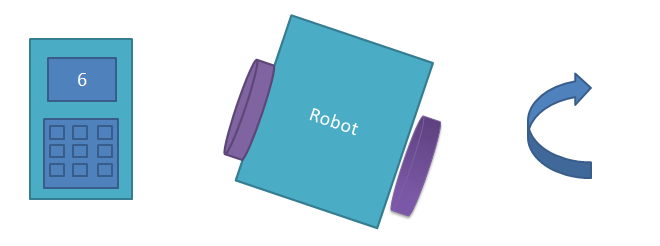
Robot irányítása „jobbra” mozgáshoz

Robot irányítása „balra” mozgáshoz
Üzenet küldés: ITT